Plane¶
- class pyvsim.Primitives.Plane(dimension=array([0, 1, 1]), fastInit=False)[source]¶
This is a convenience class that inherits from Part and represents a rectangle. There are also convenience methods to make coordinate transformation.
To navigate in the plane, one can use the following coordinate system: \(\left[u,v\right]\) , where \(-1 <= u,v <=1\)
As a default, the \(\vec{x}\) vector is the normal for the triangles.
The point numbering convention and the axis alignment is shown in the figure below:
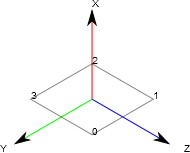
This class can represent only rectangles, so that most of its methods are greatly simplified. If you need to represent a parallelogram, you would have to implement your own class.
Methods
![]()